Continued from the previous entry.
Before
digging into the Quaternion implementation, I first inspected the
retail version of EMI again to verify its approach to applying the
rotation angles.
In the scene
'mig', I moved
Guybrush to the position (1,0,-7) so it was easy to see the result of
rotation. Next, I set the rotation to (0,0,0), resulting in the
following, which represents our origin pose:
 |
| The origin pose for all of the rotation tests |
To
make sure that nothing else is interfering, I'll set Guybrush back to
this rotation before each operation. Next, I set Guybrush to 90 degrees
for each of the rotation angles to determine the name for each principle
axis:
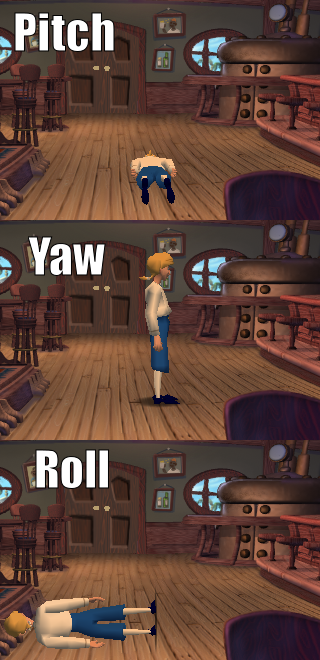 |
| Demonstrating the principle axes |
- guybrush:setrot(90,0,0) - Pitch (rotation in the Y-Axis)
- guybrush:setrot(0,90,0) - Yaw (rotation in the Z-Axis)
- guybrush:setrot(0,0,90) - Roll (rotation in the X-Axis)
We now know which axis is which in the
setrot() method. Using this information, we'll determine what order the rotations are applied by combining the principle rotations:
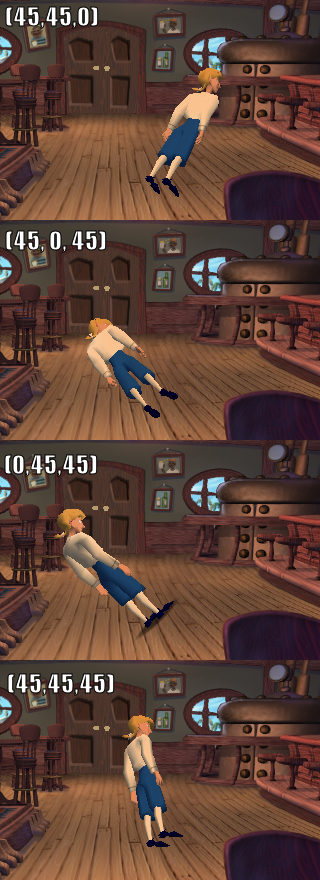 |
| Combined rotations on the principle axes |
|
Which is produced by the following rotations:
- guybrush:setrot(45,45,0)
- guybrush:setrot(0,45,45)
- guybrush:setrot(0,45,45)
- guybrush:setrot(45,45,45)
From this, we can say that the setrot()
method's arguments are definitely Pitch, Yaw, Roll, in that order. From the
combined rotations, it appears that the rotations are applied in the
order ZXY (by axis). With this information, I can ensure that the Quaternion
implementation is using the correct rotation order.
No comments:
Post a Comment